CPSRC’s research in the areas of autonomous systems and interconnected things converges on novel approaches to the development of new concepts, algorithms, sensors, and software required to make self-driving cars a reality. In particular, autonomous systems research within the CPSRC at UC Santa Cruz includes the design of communication and control algorithms for robust and secure systems, the generation of secure protocols for networked dynamical systems, the design of sensor technology suitable for distributed multi-agent systems, the development of simulation tools for human-machine interaction in emulated real-world environments, and their numerous applications to the development of self-driving vehicles. In addition, CPSRC’s work in mobile computing, cloud computing, inter-networking, and robotic systems has direct application to the many challenges faced in creating real-world self-driving vehicle systems.
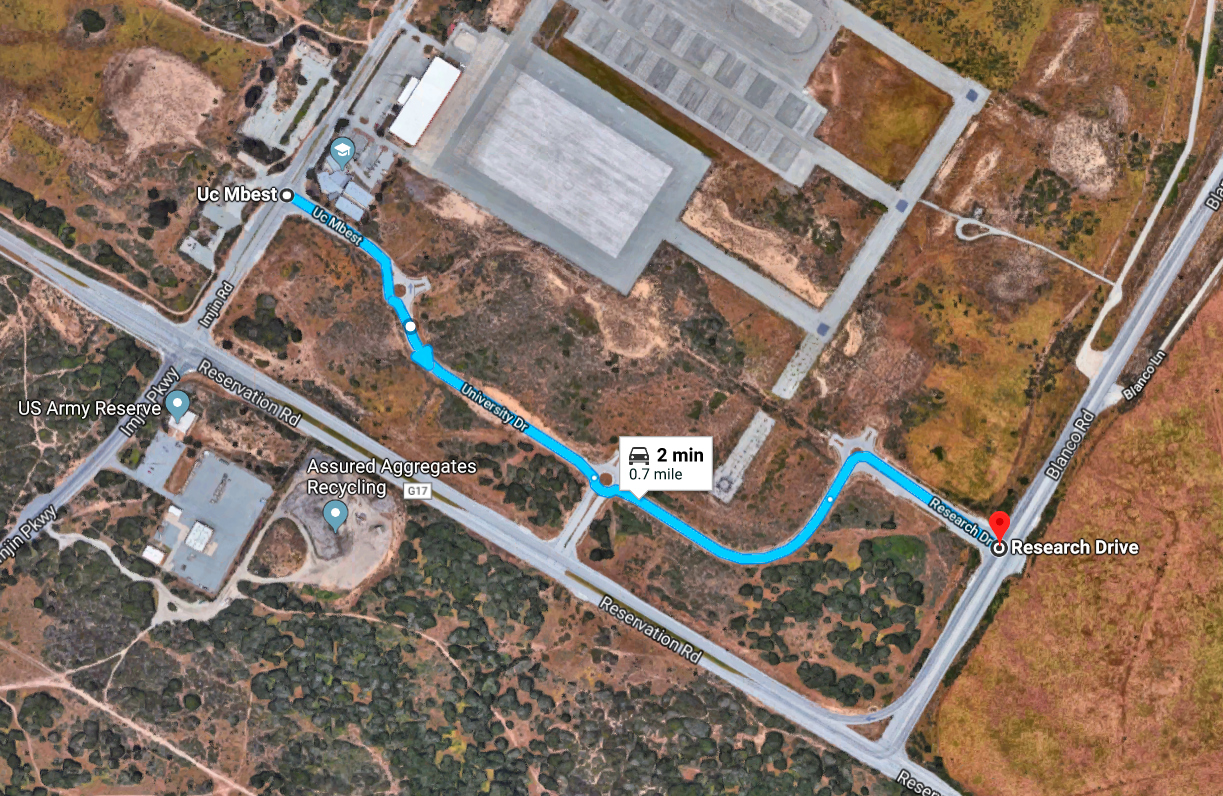
The UC Santa Cruz Monterey Bay Education, Science and Technology Center (MBEST Center)
-Private road in excellent condition that can be closed off for autonomous vehicle testing.
-Available for very low cost use as part of a UC Santa Cruz research project.
A. Song, and J. Whitehead “TownSim: Agent-based City Evolution for Naturalistic Road Network Generation”, Proceedings of the 10th Workshop on Procedural Content Generation, 2019.
J. Choi, R. Curry, and G. Elkaim “Continuous Curvature Path Generation Based on Bezier Curves for Autonomous Vehicles”, IAENG International Journal of Applied Mathematics, 2010.
J. Choi, R. Curry, and G. Elkaim “Path Planning based on Bezier Curve for Autonomous Ground Vehicles” Proceedings of the Advances in Electrical and Electronics Engineering - IAENG Special Edition of the World Congress on Engineering and Computer Science, 2008.
Ricardo Sanfelice
K. Zhang, J. Sprinkle, and R. G. Sanfelice "Computationally Aware Control of Autonomous Vehicles: A Hybrid Model Predictive Control Approach", Autonomous Robots, vol. 39, pp. 503-517, 2015.
P. Casau, R. G. Sanfelice, R. Cunha, D. Cabecinhas, and C. Silvestre "Robust Global Trajectory Tracking for a Class of Underactuated Vehicles", Automatica, vol. 58, pp. 90-98, 2015.
Abhishek Halder
S. Ghosh, A. Halder and M. Sinha “Micro Air Vehicle Path Planning in Fuzzy Quadtree Framework” Applied Soft Computing, 2011.
A. Halder, R. Garhwal, V. Agarwal and M. Sinha “Determination of Inertial Characteristics of A High Wing Unmanned Air Vehicle” Journal of Institute of Engineers, 2009.