NSF: Collaborative Research: CPS: Medium: Constraint Aware Planning and Control for Cyber-Physical Systems
The objective of this work is to generate new fundamental science for computer controlled complex physical systems, a broad class of cyber-physical systems (CPS), and demonstrate this science in aerial vehicles and walking robots. The new science enables autonomous planning and control in the presence of failures and abrupt changes in system variables. A framework for the design of algorithms that exploit awareness of the physical and design constraints to autonomously self-adapt their motion plan and control actions will be generated. The approach exploits elements from geometry, adaptive control, and hybrid control to advance the knowledge on modeling, planning, and design of CPS with constraints, nonsmooth, and intertwined continuous and discrete dynamics. Unlike current approaches, which separate the task associated with planning the motion from the design of the algorithm used for control, the algorithms to emerge from this project self-learn and self-adapt in real time to cope with unexpected changes in motion and specification constraints so as to enable autonomous systems to perform robustly and safely, and degrade gracefully under failure conditions. Specifically, the new algorithms will learn and monitor the physical and design constraints in real time, and adapt both planner and controller by selecting the appropriate constraints to enforce, with robustness and safety guarantees. The capabilities of the new tools will be demonstrated on multi-legged robots in harsh environments that make them prone to failures, and on aerial vehicles in contested/adversarial environments.
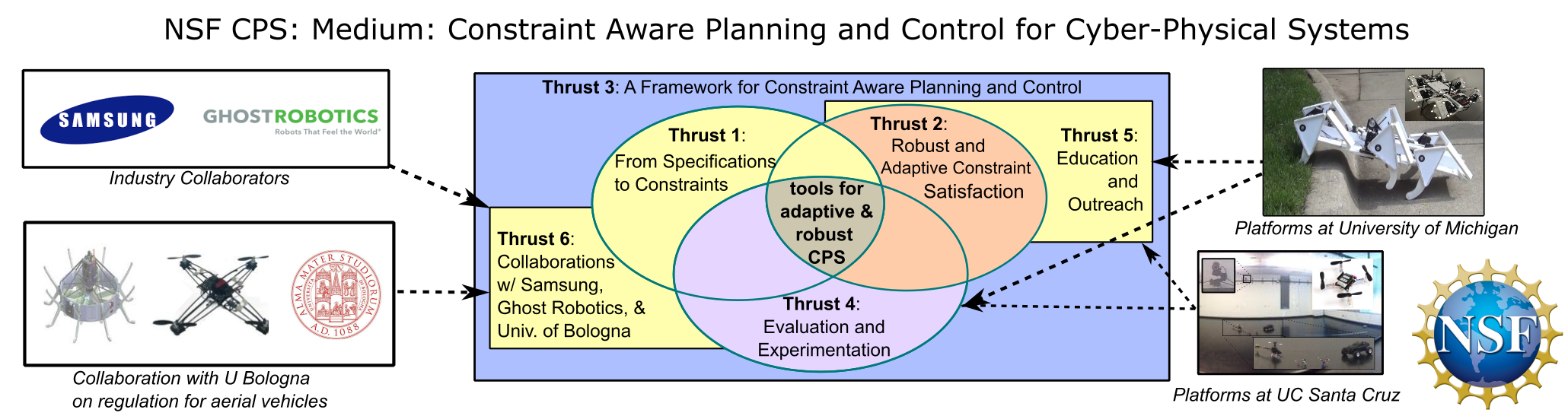
The proposed plan contributes to Science of Cyber-Physical Systems by addressing modeling, motion planning, and design of CPS with constraints, nonsmooth, and intertwined continuous and discrete dynamics. The merits of the proposal fall into four broad categories: (i) a framework to mathematically formulate learning-based planning and control for CPS with awareness of its constraints, (ii) novel architectures that lead to robust adaptive constraint satisfaction, (iii) deep understanding of roles and priorities of system constraints in CPS, and (iv) tools and design techniques that permit engineers to deploy constraint aware algorithms. The results of this work are broad in their application to all kinds of CPS that require planning and control, in particular, autonomous systems in transportation (air and ground). Synergistic collaborations with researchers at Samsung, the start-up Ghost Robotics, and at the University of Bologna are instrumental in disseminating the application of our results to industry and academia. A synergistic outreach program at UCSC and the University of Michigan impacts high school students and teachers.