AFOSR DURIP: A Test Bed for Verification and Validation of Autonomous Systems with Hybrid Dynamics under Uncertainty
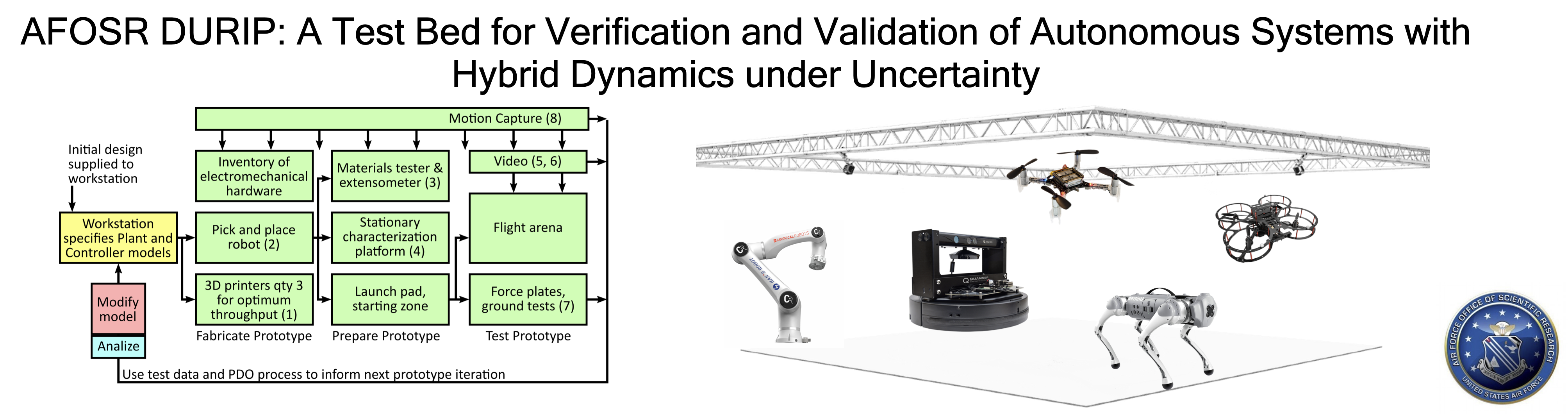
In conventional design processes, the design of the plant, the con- troller, the prototype as well as the certification of validity are products of consecutive phases of development utilizing distinct simulation, fabrication, and synthesis tools. Each phase produces an “optimal” solution, which is typically not jointly optimal for all phases. Phases need to be restarted from scratch if a new edge case or catastrophic failure is discovered at a later stage, and the interaction between failures, fabrication tolerances, and model inaccuracy is murky at best. To overcome these issues, and building from our effort as part of a current AFOSR grant, we propose to build a test bed implementing a coherent and provably rational methodology for automated design optimization, modeling, test and evaluation, and validation of autonomous systems with guaranteed levels of risk and robustness to uncertainty. The test bed will permit prototyping, experimentation, and redesign of autonomous systems and their components in an unified system. No such test bed is known yet to exist.