NSF CPS: Synergy: Collaborative Research: Computationally Aware Cyber-Physical Systems
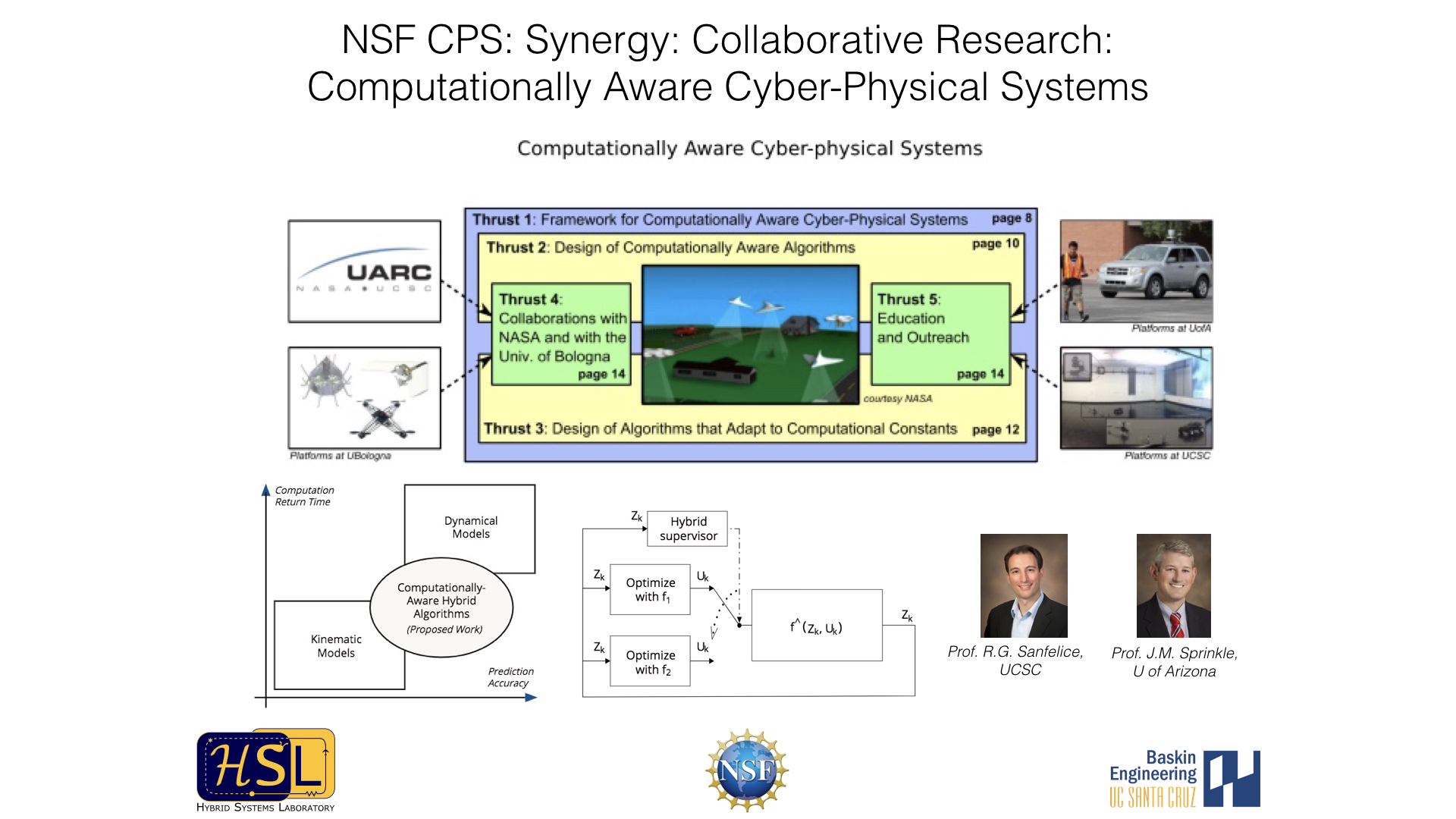
The objective of this work is to generate new fundamental science for cyber-physical systems (CPSs) that enables more accurate and faster trajectory synthesis for controllers with nonlinear plants, or nonlinear constraints that encode obstacles. The approach is to utilize hybrid control to switch between models whose accuracy is normalized by their computational burden. This synergistic approach is why we deem our proposed work will enable Computationally Aware Cyber-Physical Systems. The results from this project will advance the knowledge on modeling, analysis, and design of CPSs that utilize predictive methods for trajectory synthesis under constraints. Current algorithm designs seldom include the computational limitations of the hardware/software on which they are implemented as explicit constraints; thus, a challenge is to correctly approximate (or account for) how these constraints can be overcome for real-time systems. The results will include methods for the design of algorithms that adapt to the computational limitations of autonomous and semi-autonomous systems that must satisfy stringent timing and safety requirements. For this purpose, we propose tools capable of accounting for computational capabilities in real-time, and hybrid feedback algorithms that include prediction schemes exploiting computational capabilities to arrive at more accurate predictions, within the time constraints. The problem space will draw from models of Unmanned Air Systems (UAS) in the National Air Space (NAS); algorithms will be modeled in terms of hybrid dynamical systems, to guarantee dynamical properties of interest.