Collaboration with NXP: Path Planning Algorithm Development and Software Implementation
Principal Investigator(s):
Heiner Litz, Ricardo Sanfelice
Executive Summary:
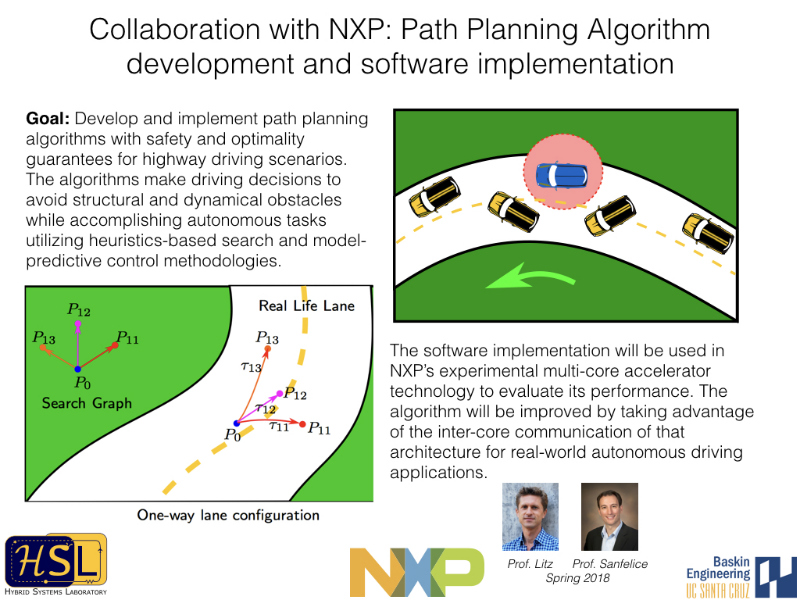
The goal of this project is to develop and implement path planning algorithms with safety and optimality guarantees for highway driving scenarios. The algorithms make driving decisions to avoid structural and dynamical obstacles while accomplishing autonomous tasks utilizing heuristics-based search and model-predictive control methodologies. The software implementation will be used in NXP's experimental multi-core accelerator technology to evaluate its performance. The algorithm will be improved by taking advantage of the inter-core communication of that architecture for real-world autonomous driving applications.